Researches
RFID Backscatter based Sensing
BIFROST: Reinventing WiFi Signals Based on Dispersion Effect for Accurate Indoor Localization
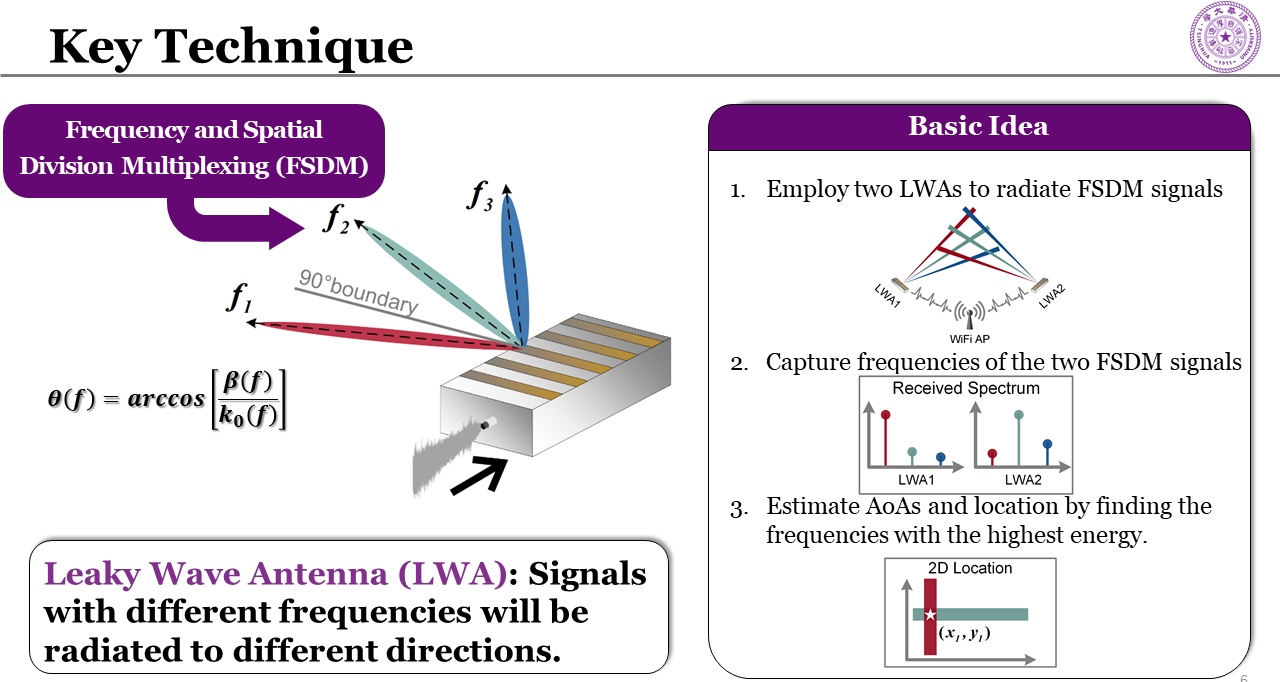
WiFi-based device localization is a key enabling technology for smart applications, which has attracted numerous research studies in the past decade. Most of the existing approaches rely on Line-of-Sight (LoS) signals to work, while a critical problem is often neglected: In the real-world indoor environments, WiFi signals are everywhere, but very few of them are usable for accurate localization. As a result, the localization accuracy in practice is far from being satisfactory. This paper presents BIFROST, a novel hardware-software co-design for accurate indoor localization. The core idea of BIFROST is to reinvent WiFi signals, so as to provide sufficient LoS signals for localization. This is realized by exploiting the dispersion effect of signals emitted by the leaky wave antenna (LWA). We present a low-cost plug-in design of LWA that can generate orthogonal polarized signals: On one hand, LWA disperses signals of different frequencies to different angles, thus providing Angle-of-Arrival (AoA) information for the localized target. On the other hand, the target further leverages the antenna polarization mismatch to distinguish AoAs from different LWAs. In the software layer, fine-grained information in Channel State Information (CSI) is exploited to cope with multipath and noise. We implement BIFROST and evaluate its performance under various settings. The results show that the median localization error of BIFROST is 0.81m, which is 52.35% less than that of SpotFi, a state-of-the-art approach. SpotFi, when combined with BIFROST to work in the realistic settings, can reduce the localization error by 33.54%. This work appears in the proceedings of ACM SenSys 2023.
Resources
Palantir: Accurate Mobile Sensing over a LoRa Backscatter Channel
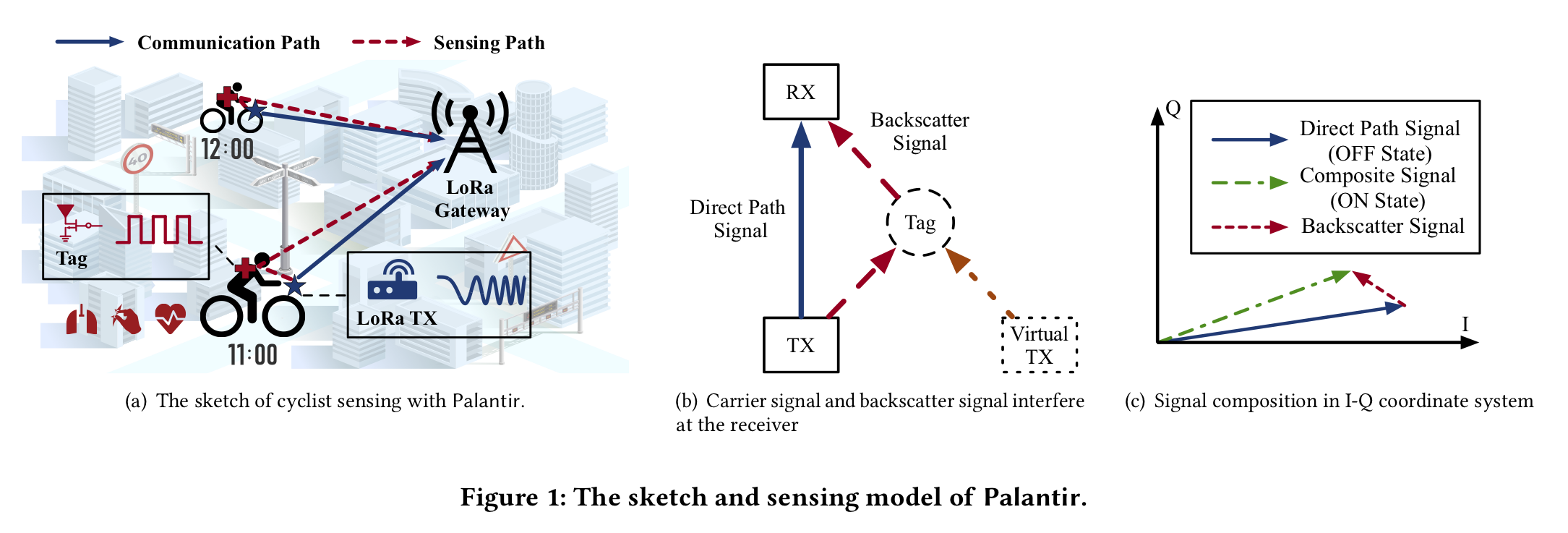
Wireless sensing, which acquires the information of a target by collecting and analyzing wireless signals, is a key enabling technology for ubiquitous Internet of Things applications. In the past decade, we have witnessed a large body of studies on wireless sensing. The wireless technologies for sensing range from acoustic, RFID and WiFi to LoRa and mmWave, while the sensing capabilities extensively cover motion and activity sensing, mobility measurement, environmental sensing, and material sensing, etc. However, how to sense the condition of a mobile target in a long range is still a missing piece. In this work, we present Palantir, a first-of-its-kind long-range sensing system based on the LoRa backscatter, for cyclists in the public bicycle sharing systems. For this purpose, we design a complete signal processing flow to particularly deal with multiple challenging problems that are coupled with each other, such as amplitude instability, frequency offset, clock drift, spectrum leakage, and multiplicative noise. We evaluate the performance of Palantir by performing comprehensive benchmark experiments. We also build a prototype and conduct a case study of respiration monitoring in the real world. The results demonstrate that Palantir performs accurate sensing at the range of 100 m with a median deviation of motion period to as low as 0.2%, and works well for mobile targets. This work appears in ACM Sensys 2021.
Resources
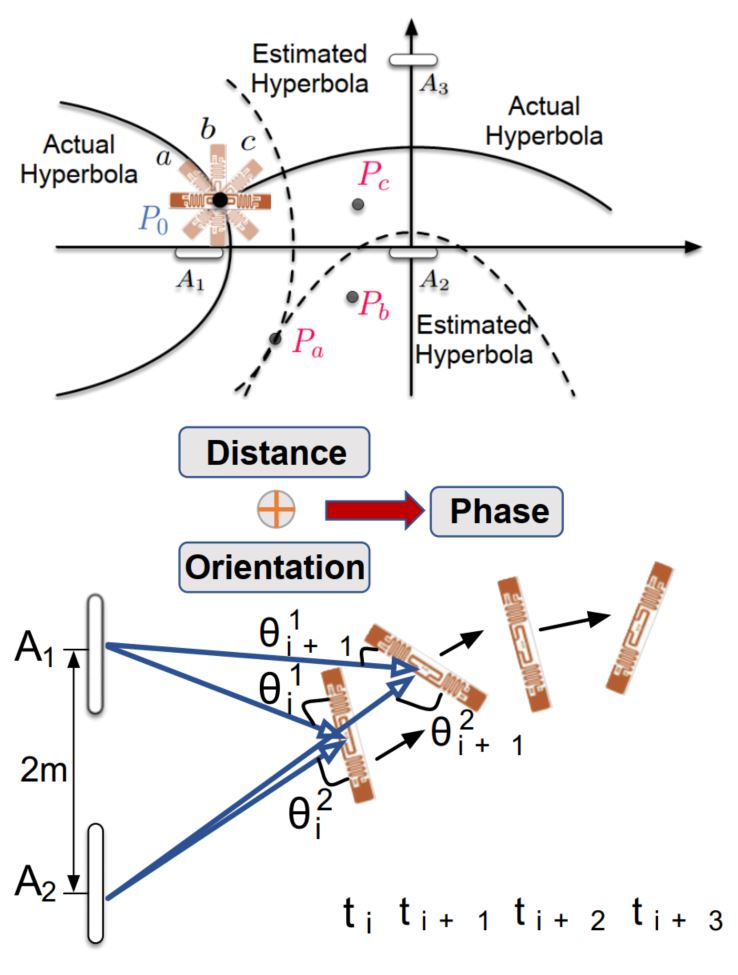
RF-Prism: Versatile RFID-based Sensing through Phase Disentangling
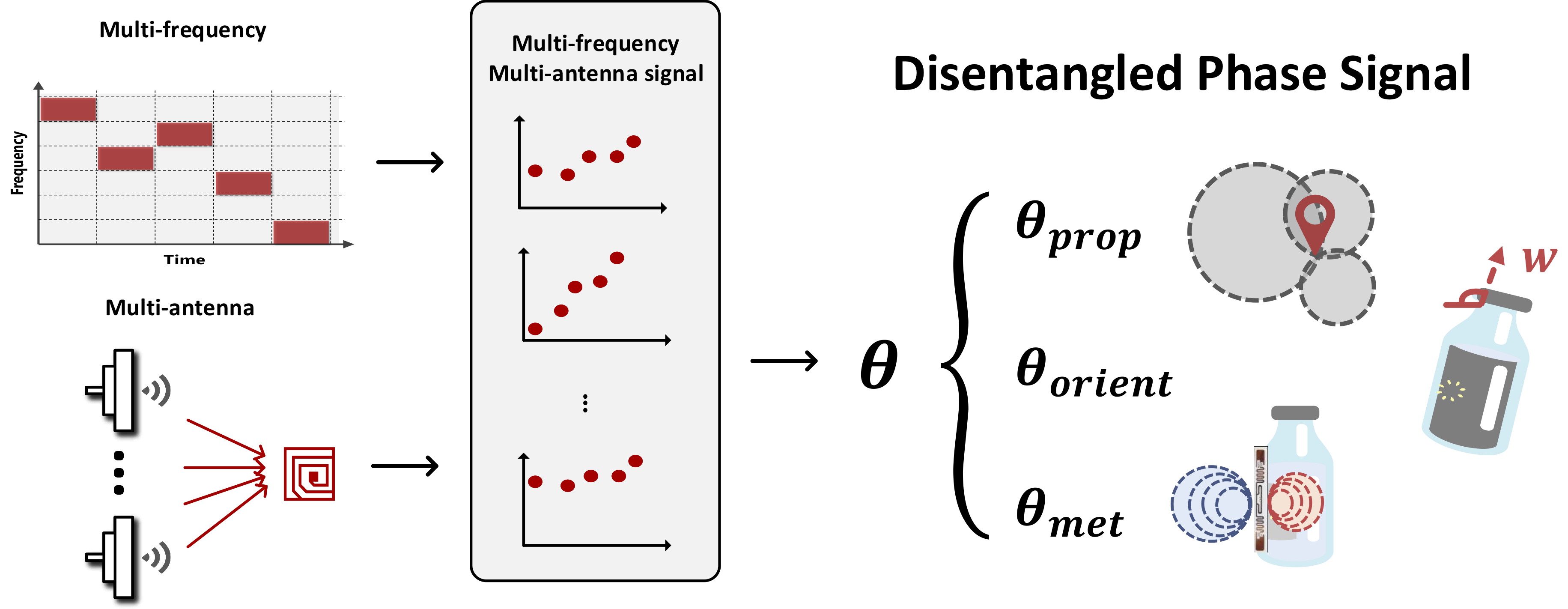
Existing approaches of RFID-based sensing are often restricted in terms of the sensing capability or accuracy, due to the phase entanglement problem: the phase of the RFID signal is jointly affected by multiple factors, and the change in the signal phase cannot be directly attributed to any one of them. In order to tackle this problem, we propose RF-Prism, a versatile sensing approach that can simultaneously infer multiple physical factors (i.e., location, orientation, and material of targets), purely based on the phase readings. RF-Prism includes a comprehensive model to describe how different physical factors affect the phase of the received signal, and a complete design to disentangle the phase in the multi-frequency and multi-antenna scenario. We implement RF-Prism and evaluate its performance with extensive experiments. The results show that RF-Prism simultaneously achieves a mean localization error of 7.61cm, a mean orientation error of 9.83 degrees, and 87.9% material identification accuracy, which outperforms state-of-the-art approaches. This work appears in IEEE ICDCS 2021.
Resources
TwinLeak: A RFID-based Battery-free Liquid Leakage Detection System
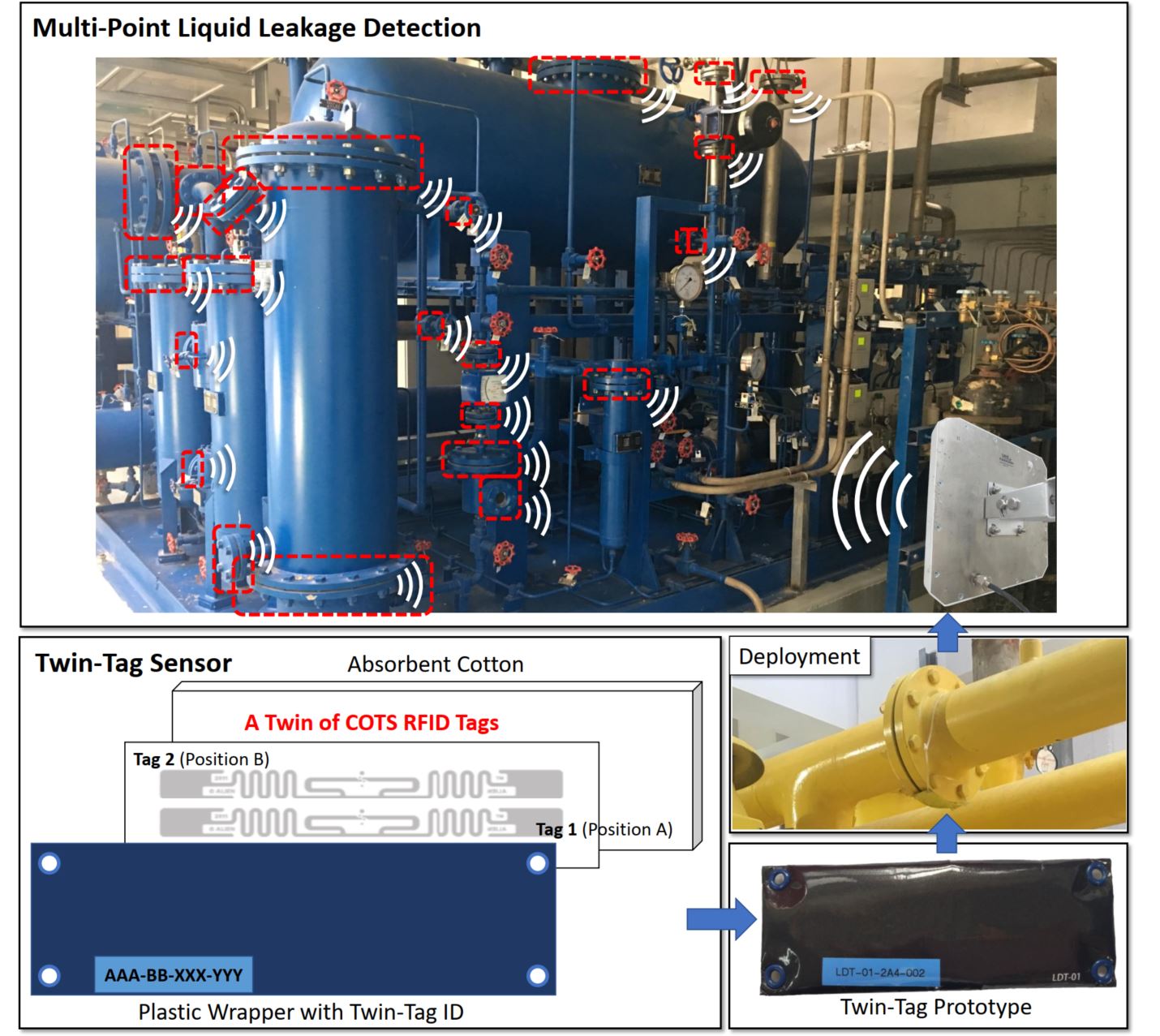
Liquid leakage detection is a crucial issue in the modern industry, which concerns industrial safety. We have built a series of RFID-based solutions, TagLeak and TwinLeak, to detect liquid leakage using COTS RFID devices. Our systems achieve the goals of accuracy and timeliness based on the fact that the inductive coupling between two adjacent tags is highly sensitive to the liquid leaked between them. In addition to detecting the liquid leakage, the upgraded version of the system TwinLeak can further estimate the leakage volume and rate simultaneously. We implement the pototypes of these systems, evaluate their performance across various scenarios, and deploy them in a real-world industrial IoT system. Specifically, TwinLeak achieves a TPR higher than 97.2%, a FPR lower than 0.5%, and a relative property estimation error around 10% on average, while triggering early alarms after only about 4.6mL liquid leaks. TagLeak appears in IEEE ICII 2018 and wins the best paper award, and TwinLeak appears in IEEE INFOCOM 2019 and wins the best presentation of the session award.
Resources
OmniTrack: An Orientation-aware RFID Tracking System
RFID tracking has attracted significant interest from both academia and industry due to its low cost and ease of deployment. Previous works focus more on tracking in 2D space or separately consider tracking of the location and the orientation. They especially struggle in 3D situations due to the increase in the degree of freedom and the limited information conveyed by the RFID tags. In this project, we propose a series of approaches, 2D-OmniTrack and 3D-OmniTrack, that can accurately track the 2D/3D location and orientation of an object. We introduce a polarization-sensitive phase model in an RFID system, which takes into consideration both the distance and the posture of an object. Based on this model, we design an algorithm to accurately track the object in 2D/3D space. Specifically, we conduct real-world experiments and present results that show 3D-OmniTrack can achieve centimeter-level location accuracy with the average orientation error of 5°, which has significant advantages in both the accuracy and the efficiency compared with state-of-the-art approaches. 2D-OmniTrack is presented in ACM/IEEE IPSN 2018 and 3D-OmniTrack is presented in ACM/IEEE IPSN 2019.
Resources
RED: RFID-based Eccentricity Detection for High-speed Rotating Machinery
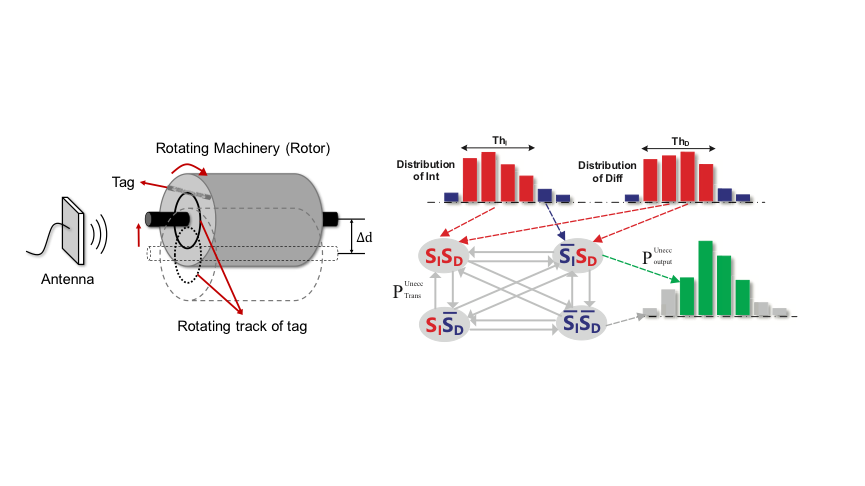
Eccentricity detection is a crucial issue for high-speed rotating machinery, which concerns the stability and safety of the machinery. Conventional solutions in industry usually require embedding special sensors which are costly and hard to deploy. Our design, named RED, is a non-intrusive, low-cost, and real-time RFID-based eccentricity detection approach. RED attaches the RFID tag to the surface of the rotating machinery and utilizes the temporal and phase distributions of tag readings as effective features for eccentricity detection. The experimental results show that RED can make a highly accurate and precise judgement with low detection latency. This work appears in INFOCOM'18 and TMC'19.